结构光先驱PrimeSense(苹果收购)方案分析
以色列公司PrimeSense创立于2005年,于2006年研发出3D传感器,在当年的E3大展上与微软建立了联系,在2009年E3大展时,微软发布了内置PrimeSense3D传感器的Kinect一代。2010年年底,PrimeSense与华硕合作开发了XtionPro,和Kinect采用了同样的3D传感器。
2012年,PrimeSense推出了当时世界上体积最小的3D传感器Capri。由于Primesense在2013年被苹果收购,不再对外输出技术,因此微软在2014年的Kinect2.0上开始使用自己的3D传感器。

Primesense的核心技术为LightCoding光编码技术,属于结构光技术的一种,是目前最具代表性的结构光技术。
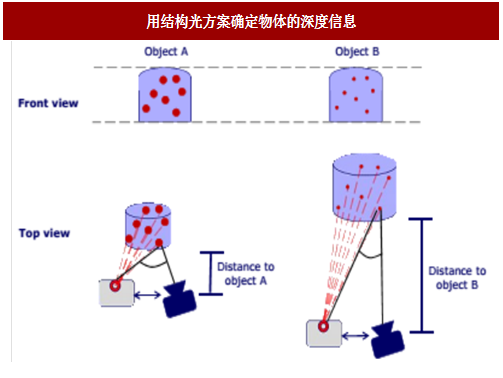
结构光技术就是用光源照明给需要测量的空间编上码,将一维或二维的特定图像投影至被测物体上,根据图像的形变情形,判断被测物体的表面形状和深度信息。与普通结构光方案(如英特尔Realsense结构光方案)不同的是,LightCoding的光源称为“激光散斑”,是激光照射到DOE衍射光栅后形成的衍射斑点,只要在空间中打上这样的结构光散斑,整个空间就被做了标记,把一个物体放进这个空间,只要分析物体上面的散斑图案,就可以知道这个物体的位置信息,从而可以非常快的进行景深信息的采集和捕捉。

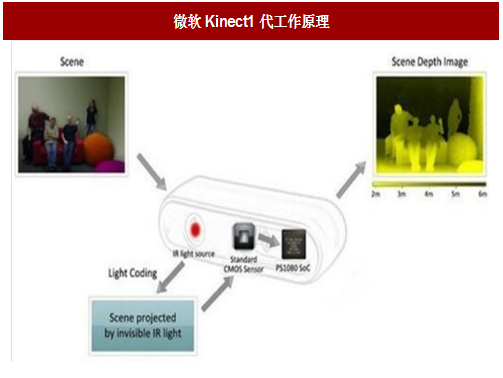
因此,拆解微软Kinect1代产品,我们可以看到,其主要的零部件包括:红外光发射器、红外CIS传感器、可见光传感器、核心数据处理芯片(PS1080)。
Primesense结构光方案的工作流程是:红外激光器发射近红外光,经过DOE等光学器件的编码形成激光散斑,随后投射到空间物体上;激光光斑投射到物体上之后会发生位移变化,红外CIS采集变形之后的光斑信息,将信息传送至PS1080芯片,经过芯片内算法的计算可以得到物体的Z轴深度信息;可见光CIS采集物体的XY轴平面图像信息,同样传送至PS1080芯片,平面信息与深度信息综合处理便可以得到空间内物体的三维信息。


在芯片方面采用的是Primesense自制的PS1080系统级SOC芯片,可以提供640*480分辨率图像,x/y平面分辨率3mm(2m距离情况下),深度精度为1cm。PS1080芯片拥有超强的并行计算逻辑能力,可控制近红外光源,进行图像编码并主动投射近红外光谱。同时,通过一个标准的红外CMOS图像传感器接收投影的LightCoding红外光谱并且将编码后的反射斑点图像传输给PS1080,PS1080对此进行处理并生成深度图像。

以色列公司PrimeSense创立于2005年,于2006年研发出3D传感器,在当年的E3大展上与微软建立了联系,在2009年E3大展时,微软发布了内置PrimeSense3D传感器的Kinect一代。2010年年底,PrimeSense与华硕合作开发了XtionPro,和Kinect采用了同样的3D传感器。
2012年,PrimeSense推出了当时世界上体积最小的3D传感器Capri。由于Primesense在2013年被苹果收购,不再对外输出技术,因此微软在2014年的Kinect2.0上开始使用自己的3D传感器。

图:微软Kinect1代采用Primesense结构光技术

图:微软Kinect1代工作原理
结构光技术就是用光源照明给需要测量的空间编上码,将一维或二维的特定图像投影至被测物体上,根据图像的形变情形,判断被测物体的表面形状和深度信息。与普通结构光方案(如英特尔Realsense结构光方案)不同的是,LightCoding的光源称为“激光散斑”,是激光照射到DOE衍射光栅后形成的衍射斑点,只要在空间中打上这样的结构光散斑,整个空间就被做了标记,把一个物体放进这个空间,只要分析物体上面的散斑图案,就可以知道这个物体的位置信息,从而可以非常快的进行景深信息的采集和捕捉。

图:用结构光方案确定物体的深度信息

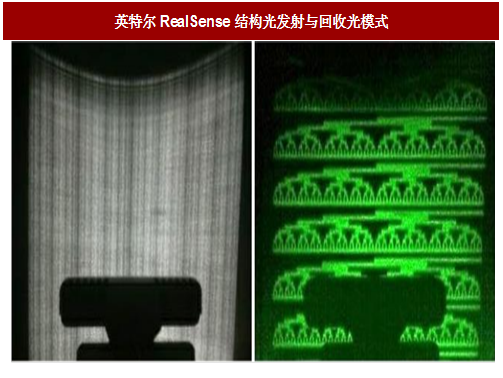
图:英特尔RealSense结构光发射与回收光模式
参考中国报告网发布《2018-2023年中国3D产业市场竞争现状调查与未来发展方向研究报告》
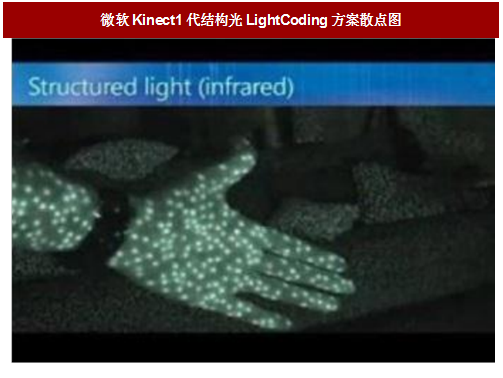
Primesense的LightCoding就是以红外线发出激光,透过镜头前的DOE(衍射光栅)形成激光光斑,随后均匀分布投射在测量空间中,再透过红外线摄像头记录空间中的每个散斑,获取原始资料后,再透过芯片计算成具有3D深度的图像。
图:微软Kinect1代结构光LightCoding方案散点图

图:微软Kinect1代主要零部件
因此,拆解微软Kinect1代产品,我们可以看到,其主要的零部件包括:红外光发射器、红外CIS传感器、可见光传感器、核心数据处理芯片(PS1080)。

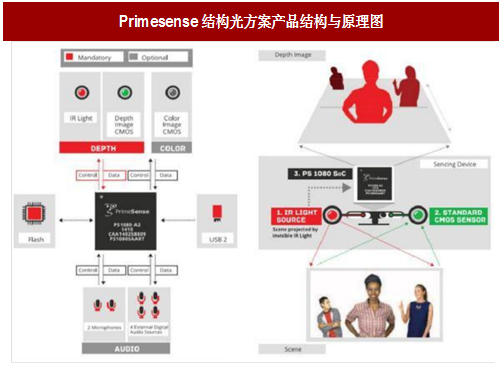
图:Primesense结构光方案产品结构与原理图
Primesense结构光方案的工作流程是:红外激光器发射近红外光,经过DOE等光学器件的编码形成激光散斑,随后投射到空间物体上;激光光斑投射到物体上之后会发生位移变化,红外CIS采集变形之后的光斑信息,将信息传送至PS1080芯片,经过芯片内算法的计算可以得到物体的Z轴深度信息;可见光CIS采集物体的XY轴平面图像信息,同样传送至PS1080芯片,平面信息与深度信息综合处理便可以得到空间内物体的三维信息。

图:Kinect1代使用的摄像头与发射器

图:微软Kinect1采集的三维图像
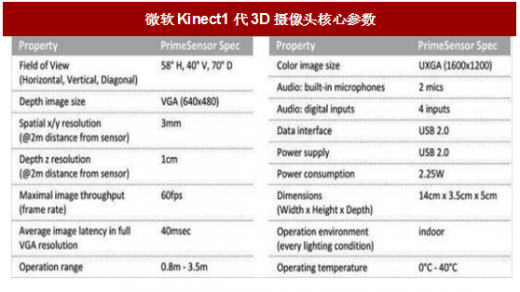
在芯片方面采用的是Primesense自制的PS1080系统级SOC芯片,可以提供640*480分辨率图像,x/y平面分辨率3mm(2m距离情况下),深度精度为1cm。PS1080芯片拥有超强的并行计算逻辑能力,可控制近红外光源,进行图像编码并主动投射近红外光谱。同时,通过一个标准的红外CMOS图像传感器接收投影的LightCoding红外光谱并且将编码后的反射斑点图像传输给PS1080,PS1080对此进行处理并生成深度图像。

图:Primesense自制PS1080芯片

图:微软Kinect1代3D摄像头核心参数
资料来源:中国报告网整理,转载请注明出处(GQ)
更多好文每日分享,欢迎关注公众号

【版权提示】观研报告网倡导尊重与保护知识产权。未经许可,任何人不得复制、转载、或以其他方式使用本网站的内容。如发现本站文章存在版权问题,烦请提供版权疑问、身份证明、版权证明、联系方式等发邮件至kf@chinabaogao.com,我们将及时沟通与处理。